Компания Яндекс написала в своём официальном блоге на «Хабре» о том, как она делает для себя обычные автомобили беспилотными. Статья охватывает все этапы «перевоплощения» машины, начиная с самого первого — покупки.
Всего Яндекс осуществляет 6 шагов для того, чтобы превратить стандартную машину в беспилотную (подробное описание с пояснениями доступно в блоге компании).
- Покупка автомобиля. С 2019 года Яндекс сотрудничает с Hyundai Mobis — сейчас все беспилотники Яндекса построены на модели Hyundai Sonata 8-го поколения. Компания покупает самые обычные автомобили в дилерском центре, ничем не отличающиеся от тех, что продают любым покупателям. Далее машины проходят на учёт по стандартной процедуре, получают номера и СТС.
- Выбор имени автомобиля и зачисление «на флот». В своих внутренних системах Яндекс учитывает автомобили по двум параметрам: VIN-коду (аналог MAC-адреса в компьютерах) и имени (FQDN). Каждой машине действительно нужно имя, поскольку VIN-код сложно запомнить, а государственный номер имеет свойство меняться. Поначалу компания присваивала машинам имена в честь персонажей «Мира дикого запада» (Takoda, Kohana, Akecheta), но затем разработчики стали использовать нейросеть — она сгенерировала 60 тыс. наименований. Все они уникальные, и имя каждой машины может увидеть любой желающий благодаря стикеру справа под лобовым стеклом.
- Сборка. Это один из самых масштабных этапов, который условно можно разделить на четыре рода деятельности.
- Процессы. Сборкой нужно управлять (подсчитывать метрики, выстраивать цепочки поставок, оптимизировать ресурсы) — после тестирования нескольких подходов Яндекс остановился на Scrum-фреймворке (который применяется в разработке ПО), определяя в начале каждой недели задачи на 7 дней вперёд.
- Технологии. Яндекс собирает каждый беспилотник вручную — автомобиль стоит на месте, а всё необходимое доставляют прямо к нему. Компания намеренно отказалась даже от полуавтоматического конвейера — во-первых, машины собираются очень маленькой серией (по 5 авто), во-вторых, команды постоянно экспериментируют с элементами беспилотников (а для конвейера важна неизменность конфигурации).
 Цех беспилотных автомобилей
Цех беспилотных автомобилей
- Безопасность. Вся электроника нижнего уровня (даже та, что подаёт управляющие сигналы автомобилю) работает на базе двух независимых линий питаний, и обе контролируются Яндексом. Если будут отклонения хотя бы в одной из них, машину попросту не получится сделать автономной. Компания устанавливает и подключает заранее собранные узлы, которые хранятся на складе, а затем проводит тестирование.
 Устройство фендера с боковым лидаром
Устройство фендера с боковым лидаром
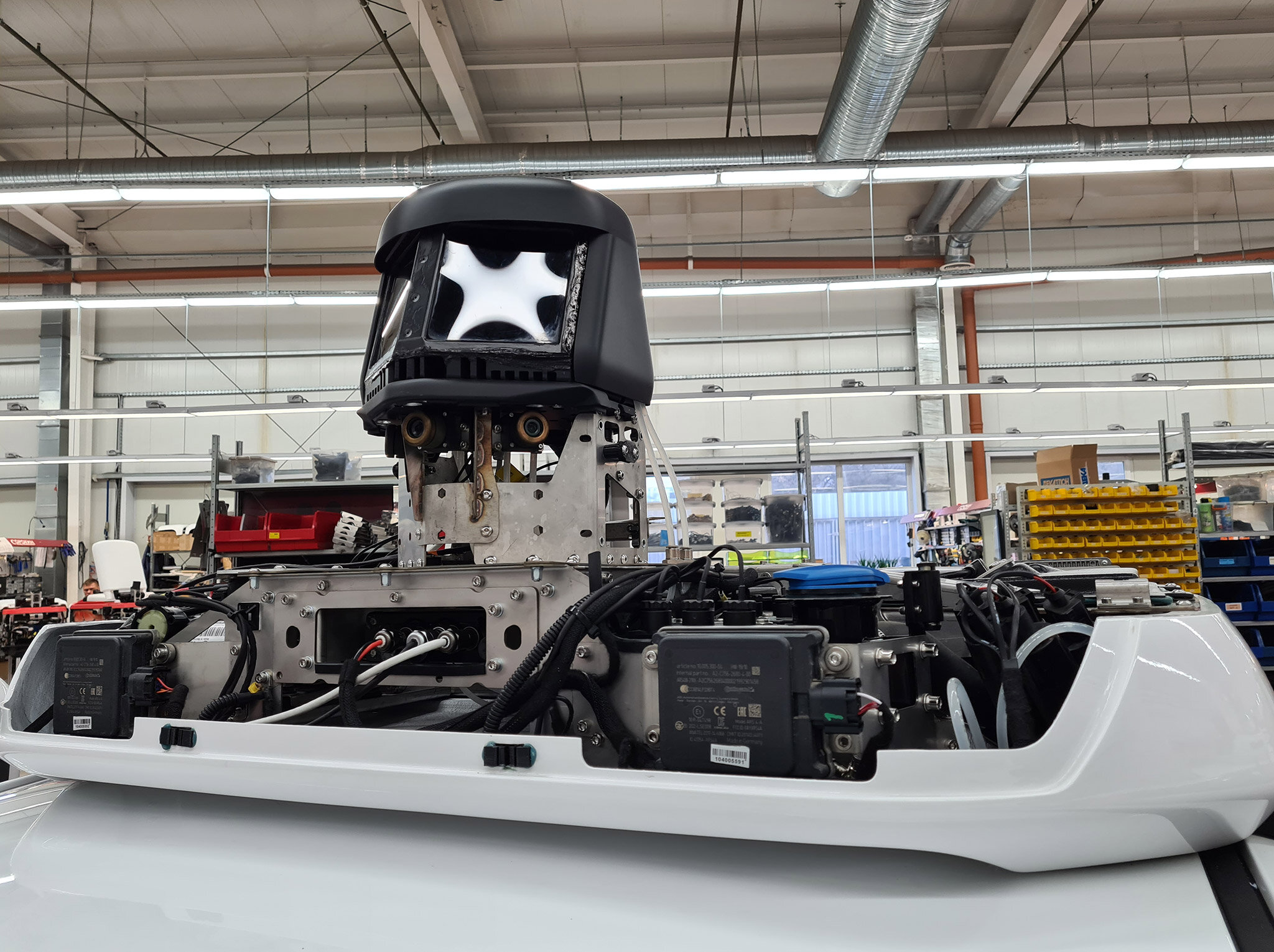
- Сенсор-блок. Это тот самый «багажник» на крыше, в котором размещено большинство «органов зрения» автомобиля. Для того, чтобы беспилотник мог оценивать окружающую обстановку, он оснащается тремя видами сенсоров (не все они в сенсор-блоке): четырьмя лидарами (один из них собственной разработки), шестью радарами и десятью камерами.
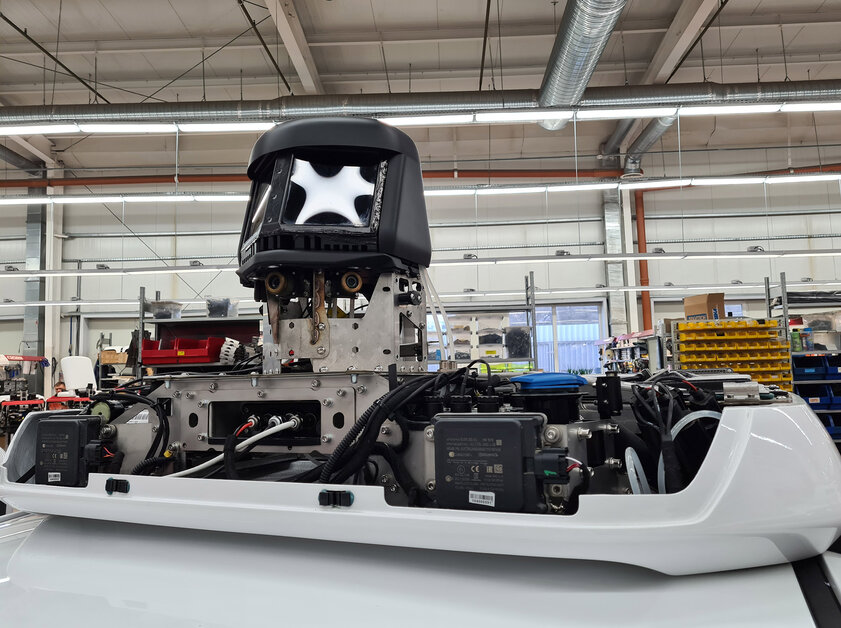 Сенсор-блок и лидар Яндекса
Сенсор-блок и лидар Яндекса
- Калибровка. Поскольку каждый беспилотник оснащается большим количеством сенсоров, важно, чтобы все они работали синхронно. Ведущим «органом зрения» выступает лидар собственного производства, все остальные датчики калибруются относительно него. Это происходит следующим образом: авто едет по большому помещению, в котором установлено множество шахматных досок под разными углами в форме круга. Когда беспилотник накапливает необходимое число кадров окружения, сенсоры синхронизируются между собой на основе собранных данных.
 Процесс калибровки
Процесс калибровки
- Сертификация. После всего вышеописанного автомобиль перестаёт быть обычным Hyundai Sonata, и его необходимо сертифицировать на соответствие стандартам безопасности. Для этого машины отправляются в «НАМИ-Фонд».

- Запуск и тестирование. На последнем этапе разработчики устанавливают на бортовой компьютер UNIX-подобную операционную систему и повторно тестируют все системы, агрегаты и датчики. Затем беспилотники проезжают 400 км на специальном полигоне под присмотром водителя для финальной докалибровки — поскольку лидары сканируют пространство более чем на 200 метров, их невозможно настроить в помещении при скоростях до 40 км/ч. Во время этого повторно проверяется надёжность всех узлов и агрегатов.