
Компания НТЦ ИТ РОСА объявила о выходе новой версии операционной системы РОСА Фреш — 13.2. Апдейт переводит работу ОС на более современный технологический стек, повышает комфорт повседневного использования и расширяет возможности работы с графикой и программным обеспечением.
Основой релиза стало ядро Linux 6.12, благодаря чему повышается производительность системы и обеспечивается более стабильная работа всех её компонентов. РОСА Фреш 13.2 получила системные библиотеки glibc 2.40 и современные компиляторы GCC 14.3 и Clang 19.1 — всё это крайне важно для разработчиков современных приложений.
Особенностью новой версии РОСА Фреш стала одновременная поддержка, и современной подсистемы Wayland, и уже ставшей классической X11. Такая возможность даёт больше гибкости при работе с программным обеспечением. Поддержка трёхмерной графики обеспечена Mesa 25.3 и полуавтоматической установкой драйверов для видеокарт NVIDIA.
В версию 13.2 включены несколько сред рабочего стола: KDE Plasma 6.5 как основная современная среда, KDA Plasma 5.27, чтобы обеспечить обратную совместимость, а также GNOME 49 и LXQt 2.3 для расширения сценариев использования.
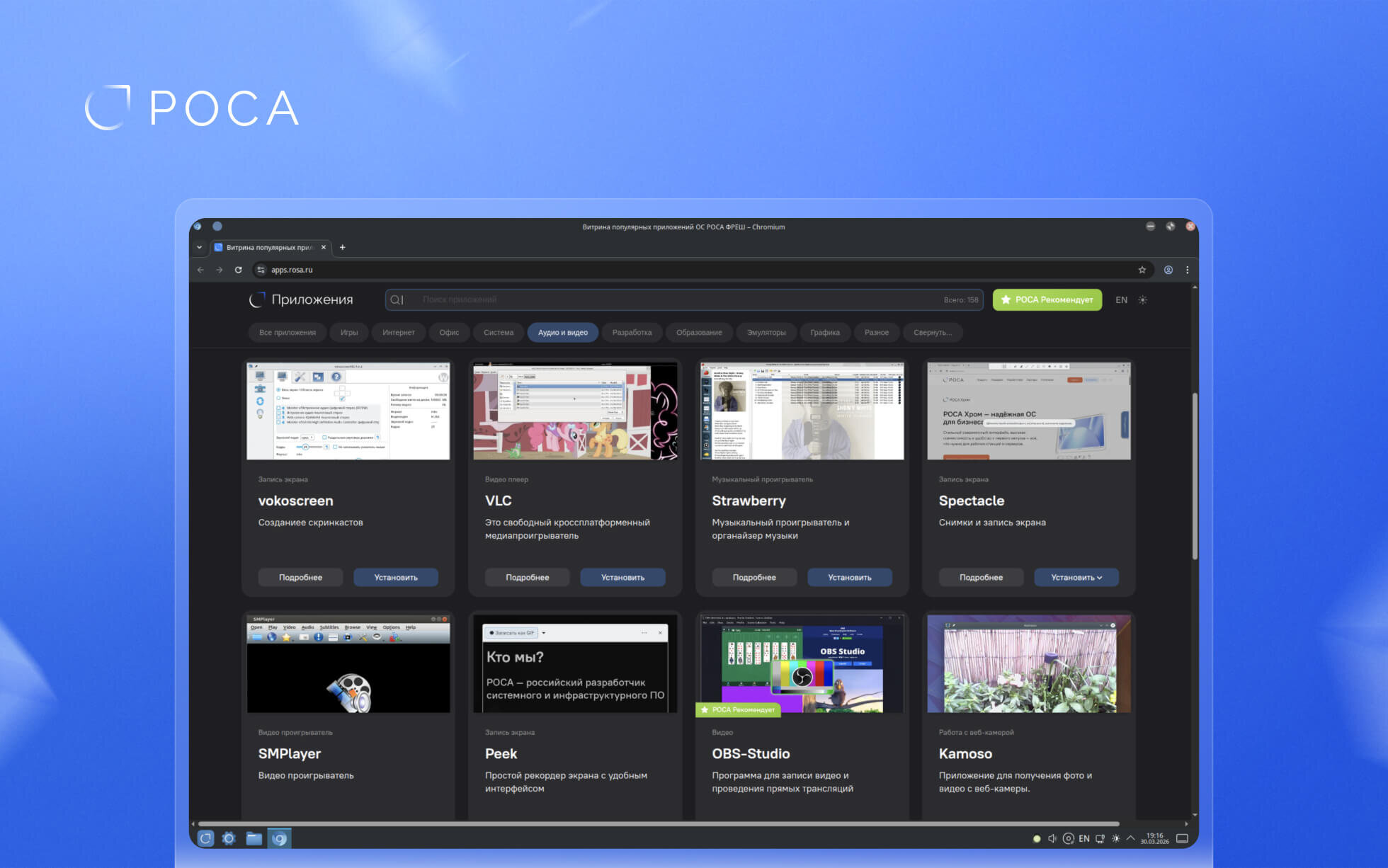
Одним же из ключевых нововведений стала витрина (магазин) приложений. Теперь пользователи могут без знаний о структурах пакетов и зависимостей устанавливать необходимые приложения «в один клик».
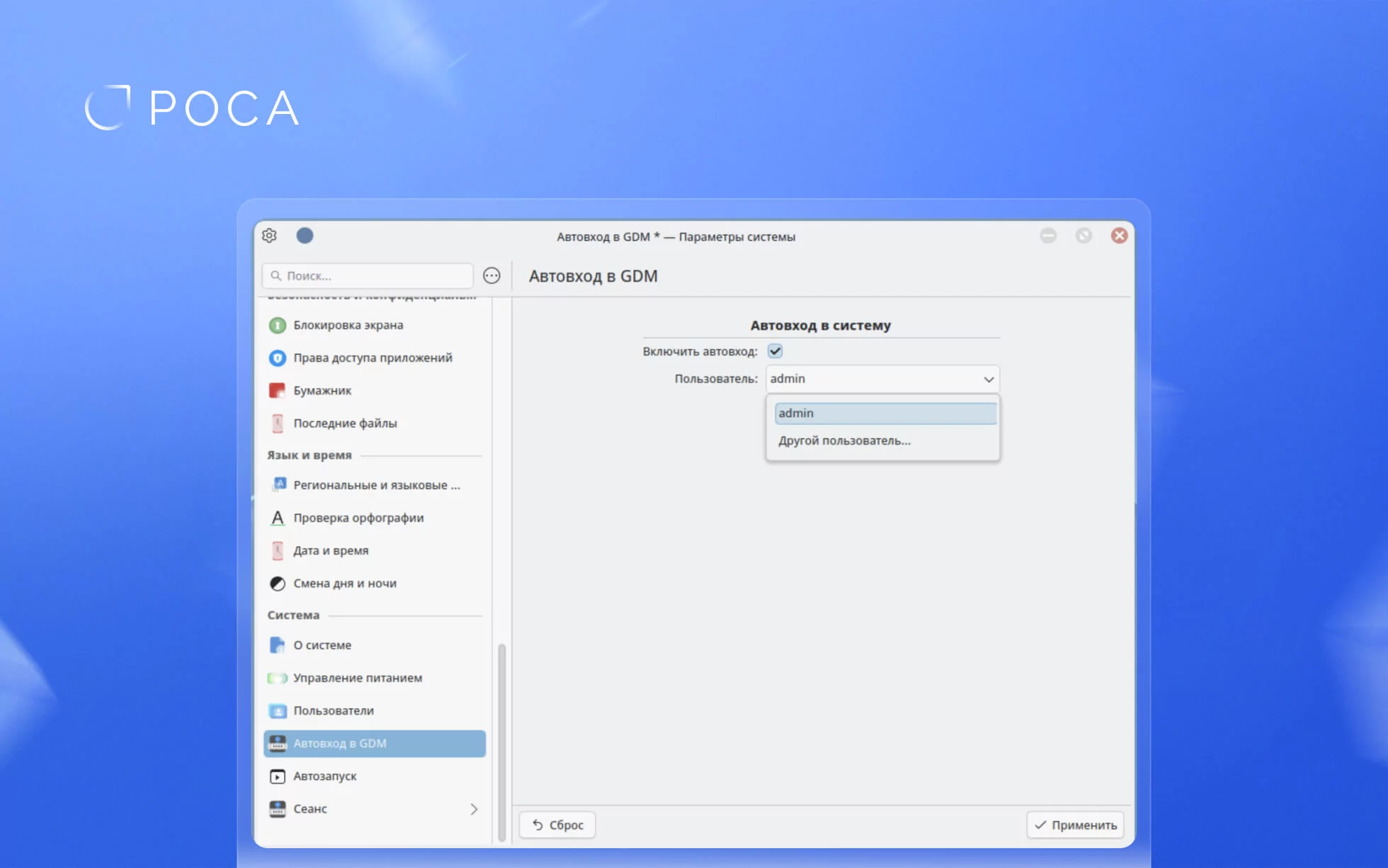
Поработали создатели операционной системы и над улучшением пользовательского интерфейса. Среда KDA Plasma получила полноценную графическую настройку параметров менеджера входа GDM, включая возможность включения автоматического входа. Ранее подобные действия требовали ручной настройки через консоль.
В процессе установки появилась поддержка установки по протоколу VNC — таким образом без труда можно реализовать сценарий удалённой или серверной установки операционной системы. Обновление добавляет и утилиту rpmgrab, с помощью которой для RPM-пакетов не требуется запускать командную строку — всё делается через удобный графический интерфейс.
Компания НТЦ ИТ РОСА предусмотрела несколько дополнительных образов: первый — без графического интерфейса, второй — минимальный сервисный образ без firmware для развёртывания в виртуальных средах.

